 |
 |
 |
 |
 |
|
|
|
|
|
![[image of flower]](../../ima/flowXS_01.gif)
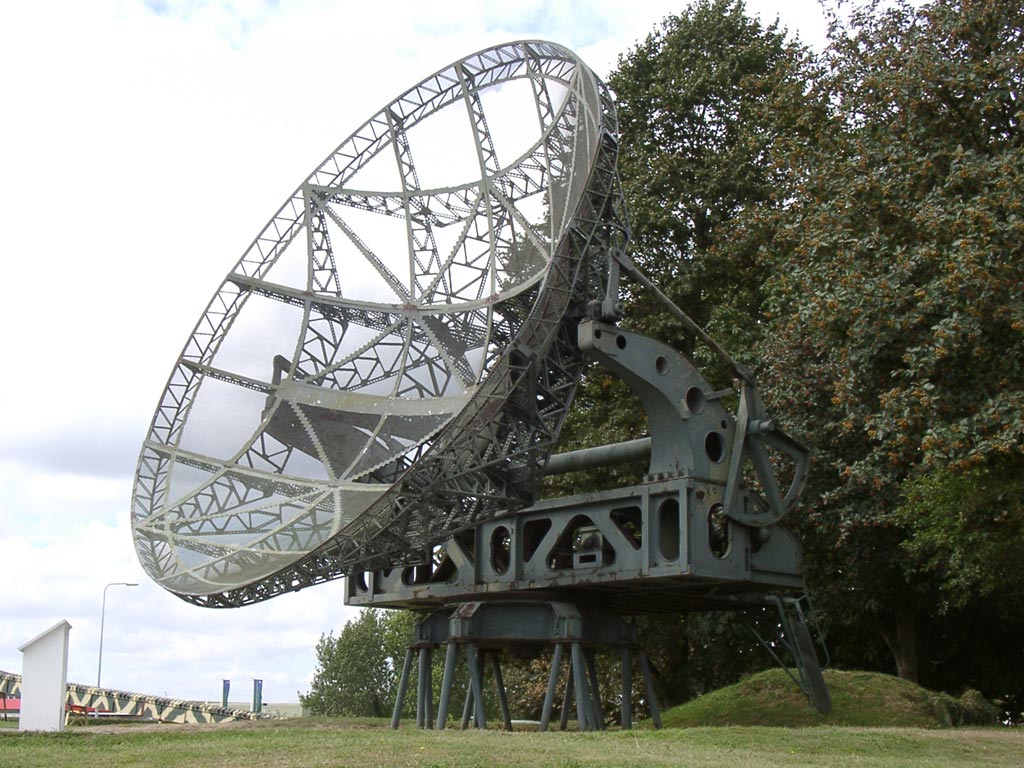
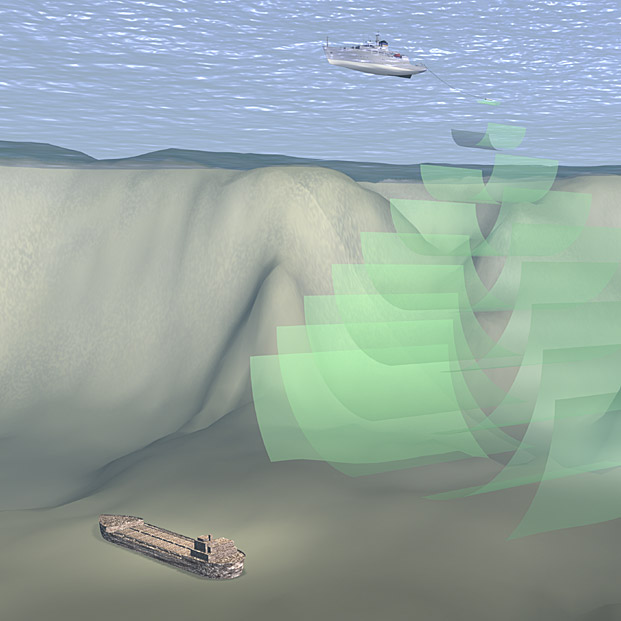
Radar and Sonar |
|
Chronology
Radio Detection and Ranging (Radar) is an electrical system that detects the size, distance and velocity of an object in space. In pulse radar, pulses of electromagnetic (EM) radiation are sent out (transmitted) and bounced back from the detected object into a receiver via an antenna. The time it takes to receive the pulse indicates the distance of the object. In continuous wave (CW) radar, the presence, but not the distance, of an object is indicated by its distortion of the radar image. A third type of radar, used in airplane altimeters at low elevations, is called frequency modulation, continuous wave (FM CW) radar. A pulse is sent out at one frequency while the sending frequency is changed. When the pulse returns, it affects the new frequency and is detected. The average of the old and new frequencies is proportional to the distance from the ground and thus gives an accurate measure of airplane elevation. How 96 Radar is used on land, in aircraft, on ships, and in satellites. If the location of the detected object (airport tower, buoy, etc.) is known, radar can be used to determine the location of the ship or aircraft carrying the radar set, so it serves as an important safety device for the people on board. The invention of radar depended on the invention of radio, which depended on the invention of electricity. Sonar (sound navigation and ranging) is equipment that transmits sound waves in water and registers the vibrations reflected back from an object to determine direction and distance of an object, which may be submarines, schools of fish, water depth and mapping, and body functions in medicine. Passive sonars listen without transmitting. Active sonar creates a pulse of sound ("ping"), and then listens for reflections of the pulse. The time from emission of a pulse to its reception is a measure of distance. To measure the bearing, one uses several pings from different directions and compares their different arrival times. Wiki n.p. In 1903, a German engineer, Hülsmeyer, experimented with radio waves reflected from ships and obtained a patent in 1904. Since the distances involved were about 1 mile, no interest was shown in this technique. In 1922, two Americans, A. H. Taylor and L. C. Young, working at the Naval Research Laboratory (NRL) in Anacostia, MD, detected a wooden ship in the nearby Anacostia River using a continuous wave (CW) wave-interference radar with a separated transmitter and receiver. The wavelength was 5 m. They submitted a proposal for further research, but it was not accepted. In 1925, Breit and Tuve, used pulse radar to measure the height of the ionosphere. In 1930, L. A. Hyland, an American working at the Naval Research Laboratory (NRL) , accidently detected an airborne airplane using wave-interference radar to detect a grounded airplane. The frequency was 33 MHz and the distance was 2 miles. Further research was stimulated by this event, but it continued slowly because of the small amounts of provided research money. By 1932, radar could detect objects at a distance of 50 miles. In 1933, Bell Telephone Laboratories engineers detected aircraft while conducting other experiments. In 1934, the NRL built a 60 MHZ CW wave interference radar. The CW radars built to this time could detect only the presence of an object, not its position or velocity. In 1934, the engineers at NRL began to develop pulse radar because it offered the way to determine the position and velocity of an object. Mr. R. M. Page was the first to study this type of radar, working part time. Objects were detected successfully in 1936 with a radar operating at 28.3 MHz, a pulse width of 5µs, and a distance of 25 miles. However, the low frequencies (and long wave lengths) required large antennas, which were impractical for use on ships. In 1935, Great Britain developed pulse radar using a 6 MHz frequency with a range of 40 miles. Robert Watson-Watt sent a memo of a proposed RADAR system to the British Air Ministry, entitled "Detection and location of aircraft by radio methods". In 1936 the frequency was 25 MHz and 90 miles. This range was far better than the 20 mile range of sonar, achieved only under good weather conditions. In 1936, NRL pulse radar echoes were detected using 200 MHz using a duplex radar system (transmitting and receiving antennas are located in the same box). The higher frequencies enabled use of smaller antennas, which would be important for shipboard use of antennas. The Army Signal Corps showed interest in radar by visiting the NRL in January of 1936 and developing its radar version in December of that year. In 1936, radars are placed in commercial aircraft to detect the ground, thus acting as altimeters. In 1938, the Eitel-McCullough Company developed a 200 MHz radar, called XAF, with a power of 6 kW and a range of 50 miles. The army developed the SCR-268 radar in this year for antiaircraft fire control. It required supporting searchlights because of its poor angular accuracy. In 1939, the Navy placed orders for 19 radar systems, now called CXAM, that were installed on ships by 1941. Also, in 1939, the Army developed the SCR-270 radar, a long-range radar for early warning. This was the radar that detected the Japanese attack on Pearl Harbor in December, 1941. In 1939, Great Britain developed an aircraft-intercept (AI) radar mounted on airplanes to detect enemy airplanes. It was found useful to detect enemy ships and submarines as well. In the 1940s, Randal and Boot, British engineers, developed the cavity-magnetron power tube that operated at a wavelength of 10 cm and produced a power output of about 1 kW, an improvement by 100 times at these wavelengths. The magnetron was a very important invention to further development of microwave radar. In 1944, the Army's SCR-268 was replaced by the improved SCR-584 microwave radar with improved accuracy that required no supporting searchlights or optical angle tracking. In 1946, the SCR-270 detected echoes from the moon. |
 |
|
|
|
|
{kind=link}
{kind=link}
{kind=link}